|
|
EIDORS: Electrical Impedance Tomography and Diffuse Optical Tomography Reconstruction Software |
|
EIDORS
(mirror) Main Documentation Tutorials − Image Reconst − Data Structures − Applications − FEM Modelling − GREIT − Old tutorials − Workshop Download Contrib Data GREIT Browse Docs Browse SVN News Mailing list (archive) FAQ Developer
Hosted by |
Compare 3D image reconstructionsEIDORS is able to easily compare different image reconstruction algorithms by changing the parameters of the inv_model structure.The first step is to create a simulation model
% Compare 3D algorithms
% $Id: tutorial130a.m 4051 2013-05-24 09:27:02Z bgrychtol $
imb= mk_common_model('n3r2',[16 2]);
bkgnd= 1;
% Homogenous Data
img= mk_image(imb.fwd_model, bkgnd);
vh= fwd_solve( img );
% Inhomogenous Data - Load from file 'datacom'
load datacom A B;
img.elem_data(A)= bkgnd*1.2;
img.elem_data(B)= bkgnd*0.8;
clear A B;
vi= fwd_solve( img );
% Add 15dB noise
vi_n= vi;
vi_n.meas = vi.meas + std(vi.meas - vh.meas)/10^(10/20) ...
*randn(size(vi.meas));
sig= sqrt(norm(vi.meas - vh.meas));
subplot(121);
show_fem(img); axis square;
subplot(122);
show_fem(img); axis square;
crop_model([], inline('y<0','x','y','z'))
view(-51,14);
print_convert('tutorial130a.png', '-density 100')
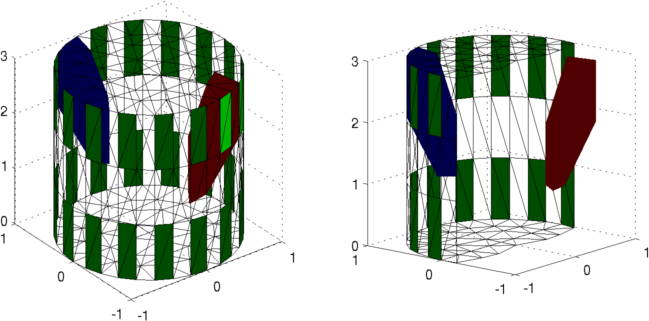
Figure: Simulation image for sample data (two different views)
% Compare 3D algorithms
% $Id: tutorial130b.m 4839 2015-03-30 07:44:50Z aadler $
clear imgr imgn
% Create Inverse Model
inv3d= eidors_obj('inv_model', 'EIT inverse');
inv3d.reconst_type= 'difference';
inv3d.jacobian_bkgnd.value = 1;
inv3d.fwd_model= imb.fwd_model;
inv3d.hyperparameter.value = 0.03;
% Gauss-Newton Solver
inv3d.solve= @inv_solve_diff_GN_one_step;
% Tikhonov prior
inv3d.R_prior= @prior_tikhonov;
imgr(1)= inv_solve( inv3d, vh, vi);
imgn(1)= inv_solve( inv3d, vh, vi_n);
% Laplace prior
inv3d.R_prior= @prior_laplace;
% inv3d.np_calc_image_prior.parameters= [3 1]; % deg=1, w=1
imgr(2)= inv_solve( inv3d, vh, vi);
imgn(2)= inv_solve( inv3d, vh, vi_n);
% Andrea Borsic's PDIPM TV solver
inv3d.prior_TV.alpha2 = 1e-5;
inv3d.parameters.max_iterations= 20;
inv3d.parameters.term_tolerance= 1e-3;
inv3d.R_prior= @prior_TV;
inv3d.solve= @inv_solve_TV_pdipm;
imgr(3)= inv_solve( inv3d, vh, vi);
imgn(3)= inv_solve( inv3d, vh, vi_n);
% Output image
posn= [inf,inf,2.5,1,1;inf,inf,1.5,1,2;inf,inf,0.5,1,3];
clf;
imgr(1).calc_colours.npoints= 128;
show_slices(imgr, posn);
print_convert('tutorial130b.png', '-density 100')
imgn(1).calc_colours.npoints= 128;
show_slices(imgn, posn);
print_convert('tutorial130c.png', '-density 100')
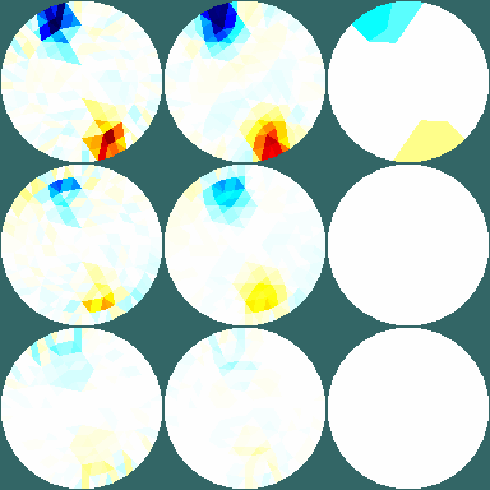
Figure: Images reconstructed with data without noise. Slices are shown at heights of (top to bottom): 1) 2.5, 2) 1.5, 3) 0.5. From Left to Right: 1) One step Gauss-Newton reconstruction (Tikhonov prior) 2) One step Gauss-Newton reconstruction (Laplace filter prior) 3): Total Variation reconstruction 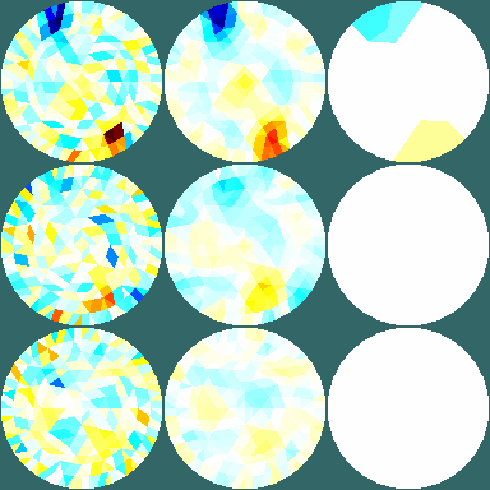
Figure: Images reconstructed with data with 15dB SNR. Slices are shown at heights of (top to bottom): 1) 2.5, 2) 1.5, 3) 0.5. From Left to Right: 1) One step Gauss-Newton reconstruction (Tikhonov prior) 2) One step Gauss-Newton reconstruction (Laplace filter prior) 3): Total Variation reconstruction |
Last Modified: $Date: 2017-03-01 08:44:21 -0500 (Wed, 01 Mar 2017) $